
Students considering to ask a thesis or a stage or another activity at IRAlab are kindly asked to first pass through the IRAlab habits page and check whether they possess the capabilities mentioned therein.
Projects related to autonomous driving
- Re-implementation of the Oxford visual car navigation approach.
This project will leverage the lab. existing pluri-ocular system, in order to build a system like the one developed by the Oxford Mobile Robots Lab. and presented in "Experience-based navigation for long-term localisation", by W. Churchill and P. Newman, published in Sep. 2013 in IJRR and more recent papers. Suggested skills: Having passed the exam of the "Machine Perception and Robotics" course. - GT Mapping - Calibration of the sensor device.
This project deals with the mapping robot that we are developing; it is based on a rotating laser-scanner, and aims at building a mapping Ground Truth (GT Mapping). In this project the student will model the relative pose of the various parts of the system, i.e., the various reference frames. Instances of relevant reference frames are the odometry one, the ones about the rotating base, the ones about the laser scanner, etc. atc. The objective of the work is to setup a procedure for the calibration of these poses by exploiting data obtained from known scenes as well as a global optimization on the pose parameters. Suggested skills: Basic notions of Robotics, Global optimization. - Refactoring of an object detection and tracking system based on the ISM approach.
This project will be performed in collaboration with STM Agrate (a stipend is foreseen for the student(s) working to this project). The project aims at refactoring an object detection and tracking system based on the ISM approach that has been already developed, and to train it for detecting various objects that are commonly observed from the forward facing cameras of an urban vehicle. Suggested skills: Basic notions of Image Processing. - SLAM-based visual odometry under ROS.
- Pluri-ocular SLAM-based visual odometry world-centric - Adaptation from the existing monocular development, and porting under ROS. In this project the student is required to get acquainted with the monocular SLAM problem (in particular, with the simplified problem of visual odometry), and the existing MoonSLAM software, in order to adapt the algorithm from the monocular to the pluri-ocular world-centric case, and to port the resulting code under the ROS middleware. Suggested skills: Basic notions of Robotics and Computer Vision, Fearlessness of partial derivatives.
- Pluri-ocular SLAM-based visual odometry robo-centric - Adaptation from the existing monocular development, and porting into ROS. In this project the student is required to get acquainted with the monocular SLAM problem (in particular, with the simplified problem of visual odometry), and the existing MoonSLAM software, in order to adapt the algorithm from the monocular to the pluri-ocular robo-centric case, and to port the resulting code under the ROS middleware. Suggested skills: Basic notions of Robotics and Computer Vision, Fearlessness of partial derivatives.
- Large maps and parallelization for AMCL and GMAPPING.
This project aims at producing new versions of the AMCL and GMAPPING software, which are existing public domain code for monte carlo localization and grid mapping. These new versions of the two software should be made able to handle very large maps, by loading and unloading (caching) the current part of the map that is in use. This new versions will then be speed up by exploiting the presence of many cores on a given CPU. Update (sep14): a parallel version of AMCL is available, i.e., it has already been developed and tested. Suggested skills: Introduction to parallel programming. - Building detection in a typical urban scenario, using LIDAR data
This project is closely linked to the last lab research trend, i.e. how to model a typical urban scene in order to get a better vehicle localization, leveraging the huge information provided by on-line map services like OpenStreetMap. With this project we propose using the lidar information from the KITTI dataset as a sensor for "buildings". The candidate will work with ROS, handle the pointclouds generated by the lidar by means of the PCL Library, and will be in close contact with the lab research team. As an example please have a look to this video: in the bottom area the building outlines will appear as green boxes, overlaid to the lidar information. These shapes are retrieved from the OSM database. This project aims to detect them from the lidar data.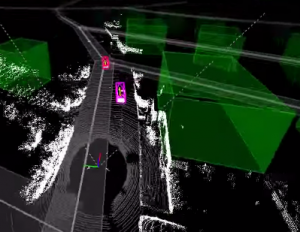
A frame from the linked KITTI youtube video

A typical urban scene "viewed through" a laser sensor. Credits: 360.here.com
Other projects
- Stage presso Tec.
La società Tec ricerca uno stagista cui offre un rimborso spese, a scopo di valutazione per una successiva assunzione. La Tec lavora nell'ambito della visione ed identificazione per l'automazione industriale. Diversi studenti iralab sono stati in passato assunti da Tec. Contattare Fabio Marchese o, in subordine, Domenico G. Sorrenti. - Visual recognition of a book in a library shelf. Jointly advised with Paola Bonizzoni
In this project the student will develop an application that will process the images coming from a smartphone camera, in order to identify a book whose spine image is known a priori (e.g., the book was previously selected by the user, and the image of the book spine were saved beforehand). All approaches can be jointly used, e.g., optical character recognition, point feature image detector and descriptors matched to the a priori image, etc. etc. This application will be part of a system driving the user to the book in an pen bookshelf library. Suggested skills: Notions of image processing. - Indoor localization with PIR sensors. Jointly advised with Daniela Micucci of Software Architecture Laboratory
In this project the student will perform the physical activity required for robustifying our PIR-based indoor localization infrastructure (which are the nodes of a WSN based on zigbee), in order to make it capable to remain operational even when the rooms where the WSN is installed are crowded with many person. The student will also develop the software running on the nodes of the WSN beyond its current status, in oder to allow a realistically flexible setup and configuration of the WSN itself. Depending on the remaining time the student will also work on putting again to work an indoor localization system based on the strength of the wireless signal from a mobile node, as well as on the integration with the inertial data from an IMU on the same mobile node (most likely this last part will not fit the time schedule and will be the core for a subsequent project). Suggested skills: Basic notions of Robotics. - MultiIMU-based dead reckoning - pose tracking.
This project might be considered one single project with the "MultiIMU-based dead reckoning - Calibration of the sensor device" proposal hereafter; the division in two projects can be exploited as a way for having a group of two people working together. In this project the student will develop the equations of a device integrating many IMU in a single 6DoF pose measuring device, together with the person in charge of the "MultiIMU-based dead reckoning - Calibration of the sensor device" project (if any). This project will then focus, assuming a known calibration of the parameters, on delivering the pose estimate. Suggested skills: Basic notions of Robotics. - MultiIMU-based dead reckoning - Calibration of the sensor device.
This project might be considered one single project with the "MultiIMU-based dead reckoning - pose tracking" proposal before; the division in two projects can be exploited as a way for having a group of two people working together. In this project the student will develop the equations of a device integrating many IMU in a single 6DoF pose measuring device, together with the person in charge of the "MultiIMU-based dead reckoning - pose tracking" project (if any). This project will then focus on the determination of a calibration procedure for the parameters of the device. Suggested skills: Basic notions of Robotics and introduction ot global optimization problems.