
Updated dates, please consider the new deadlines as hard final deadlines, no further extensions!
Paper Submission Deadline: March 31, 2019 > April 15, 2019 April 18, 2019
Click here to download the
![]()
The special session on Urban Localization focuses on approaches that exploit urban features, and/or the usage of heterogeneous localization systems in innovative ways, to obtain a reliable vehicle localization. The objective is to put together both academic and industry research in this specific domain.
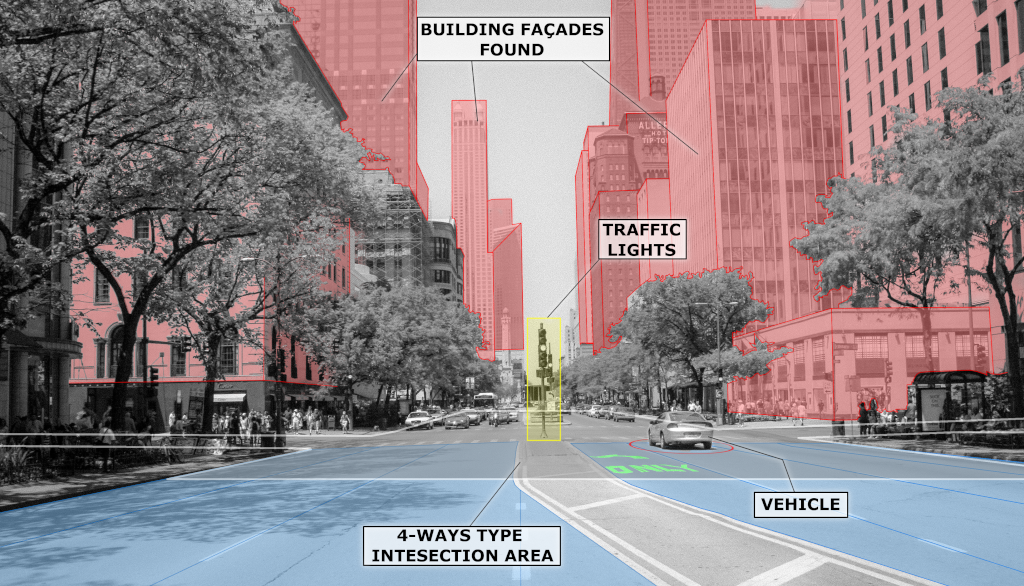
Automated vehicle navigation in GPS-denied-or-limited areas may benefit from the detection of specific urban features, such as intersections, road typology, number-of-lanes detection, traffic-flow detection without road markings, building detections, cartographic maps exploitation, cartographic maps augmentation, and other features that we cannot even anticipate, but are eager to see used for the localization purpose.
List of specific topics of interest
Topics of interest for this special session include, but are not limited to:
- detection, and exploitation for localization, of buildings, curbs, lanes, intersections, and other urban features that cannot be here anticipated;
- cartographic map exploitation for localization;
- innovative usage of different localization systems/cues for localization;
- exploitation of traffic detection and tracking in specific areas, e.g., intersections, for localization;
- datasets containing urban features, and ground truth, for benchmarking purposes.
Important dates
Submissions follow the same deadlines of regular papers, as reported in the conference website.
Paper Submissions Guidelines
At the submission point, Special Session Manuscripts will be asked to select a Code of the Special Session. Please use the code 13yku to submit to this Special Session. For any further information please follow the instructions at the conference page or contact the Special Session Chairs.
Accepted Papers
| Stefan Luthardt*, Christoph Ziegler Volker Willert, Jürgen Adamy | How to Match Tracks of Visual Features for Automotive Long-Term SLAM |
| Daniele Cattaneo*, Matteo Vaghi, Augusto Luis Ballardini, Simone Fontana, Domenico Giorgio Sorrenti, Wolfram Burgard | CMRNet: Camera to LiDAR-Map Registration |
| Alexander Schlichting*, Fabio Zachert, Dariush Forouher | Map Matching for Vehicle Localization Based on Serial Lidar Sensors |
| Patrick Burger*, Benjamin Naujoks, Hans Joachim Joe Wuensche | Unstructured Road SLAM using Map Predictive Road Tracking |
| Nico Engel*, Stefan Hoermann, Markus Horn, Vasileios Belagiannis, Klaus Dietmayer | DeepLocalization: Landmark-based Self-Localization with Deep Neural Networks |
| Noelia Hernandez Parra*, Héctor Corrales Sánchez, Ignacio Parra Alonso, Monica Rentero, David Fernandez Llorca, Miguel A. Sotelo | WiFi-based urban localisation using CNNs |
| Louis LECROSNIER*, remi boutteau, Pascal VASSEUR, XAVIER SAVATIER, Friedrich Fraundorfer | Vision based vehicle relocalization in 3D line-feature map using Perspective-n-Line with a known vertical direction |
| Ruiqi Cheng, KAIWEI WANG*, Shufei Lin, Weijian Hu, Kailun Yang, Xiao Huang, Huabing Li, Dongming Sun, Jian Bai | Panoramic Annular Localizer: Tackling the Variation Challenges of Outdoor Localization Using Panoramic Annular Images and Active Deep Descriptors |
| Victor Vaquero*, Kai Fischer, Francesc Moreno-Noguer, Alberto Sanfeliu, Stefan Milz | Improving Map Re-localization with Deep ‘Movable’ Objects Segmentation on 3D LiDAR Point Clouds |
Contacts
Urban localization Special Session Chairs:
- Domenico G. Sorrenti, domenico - dot sorrenti - at - unimib - dot - it, Università degli Studi di Milano – Bicocca, Italy
- Augusto Luis Ballardini, augusto - dot ballardini - at - unimib - dot - it, Università degli Studi di Milano – Bicocca, Italy
- Ignacio Parra Alonso, ignacio - dot parra - at - uah - dot - es, University of Alcalá de Henares, Spain
- Julius Kümmerle, julius - dot - kuemmerle - at - kit - dot - edu, Karlsruher Institut für Technologie, Germany
last update: July 4, 2019